Modeling Urbanization to Simulate Prospective Scenarios
by JP Antoni + P. Frankhauser + C. Tannier + S. Youssoufi, 2007
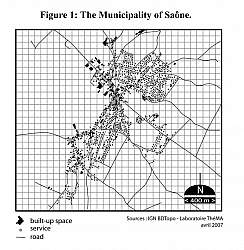
The traditional tools to manage urban growth and sprawl have a reduced predictive capability and since about 20 years, researchers try to develop modeling approaches allowing to improve describing urban growth and its consequences. They present and compare 3 of these modeling tools, relaying different theories. The produced results are quite heterogeneous.Basic model : the municipality of Saône (FR)
fig 1
Each model is defined by several rules and parameters defined in the pdf.
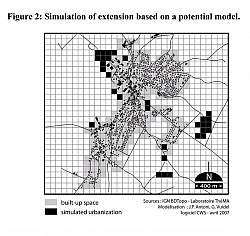
Simulation base on a potential model
which belongs to the main family of spatial interaction models, based on the idea that the urbanization process generates interaction between older and future built up areas. The simulation then tries to minimize the distances between old and future areas and allows to identify the areas with the best potentials.
Results : the potential model reveals a very controversial spatial configuration : on on hand new built spaces will increase the density of the center of the community and on the other hand they will take the shape of urban lots in the periphery that correspond to sprawl.
fig 2
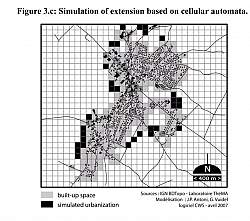
Simulation based on cellular automata
which is a discrete model which space is represented as a number of identical cells arranged in a regular grid. Each cell is defined by a limited number of states. Time is also discrete and the state of a cell at time t is function of the states of a limited number of cells on its neighborhood at time t-1.
Results : the simulation allows the identification of 31 cells corresponding to different criteria related to the affected rules into the cellular automata. It reveals a particular spatial configuration, in which the new built-up cells are located all around the existing built shape, except in one part.
fig 3
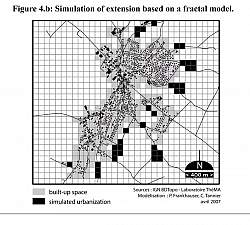
Simulation based on fractal model
which determines the areas that could be urbanized.
Results : the urbanization will take place mostly in the east part of the model and will take 2 forms. a : agglomerated near the existing built-up spaces and b scattered into the existing interstitial spaces. Urban sprawl is mainly located in the immediate periphery and around the main road axis.
fig 4
Conclusion
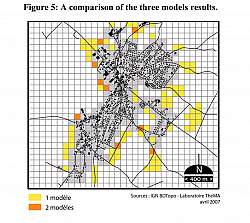
If we overlap the 3 models, there is no actual correspondence or convergence between the results. Each model focuses on cells located in coherence with the sustainable principles declined into rules or parameters, but these cells do not overlap. In order to compare more precisely these results but also to measure with a bigger accuracy their consequences on urban growth, several morphological indicators of centrality could be used.
Several reasons could explain these differences : indeed the rules are similar but, according to the models concepts, not really identical.Hence neither the potential model nor the cellular automata model takes into account the decline of accessibility to open space for already urbanized cells since rules refer only to non-urbanized cells and consider their potential for urbanization. The fractal model requires on the contrary that already urbanized cells may not be affected in their quality of life by new urbanization. Moreover the fractal model strictly avoids to destroy the contiguity of open space. Both these restrictions leads automatically to more fingering patterns. This shows that supplementary rules referring to open space and already urbanized space should be integrated in the cellular automata model and the potential model in order to obtain comparable results, what does not correspond to their usual model architecture.
fig 5
Images
Files
- huelva07-Antoni.pdf (PDF / 815.98 KB)